Experience <<
Previous Cad2020-ag4
w10
經過開會討論,決定製作無人搬運車機構,透過機械手臂與自走車結合完成無人搬運自動控制與機電整合的產品

W11
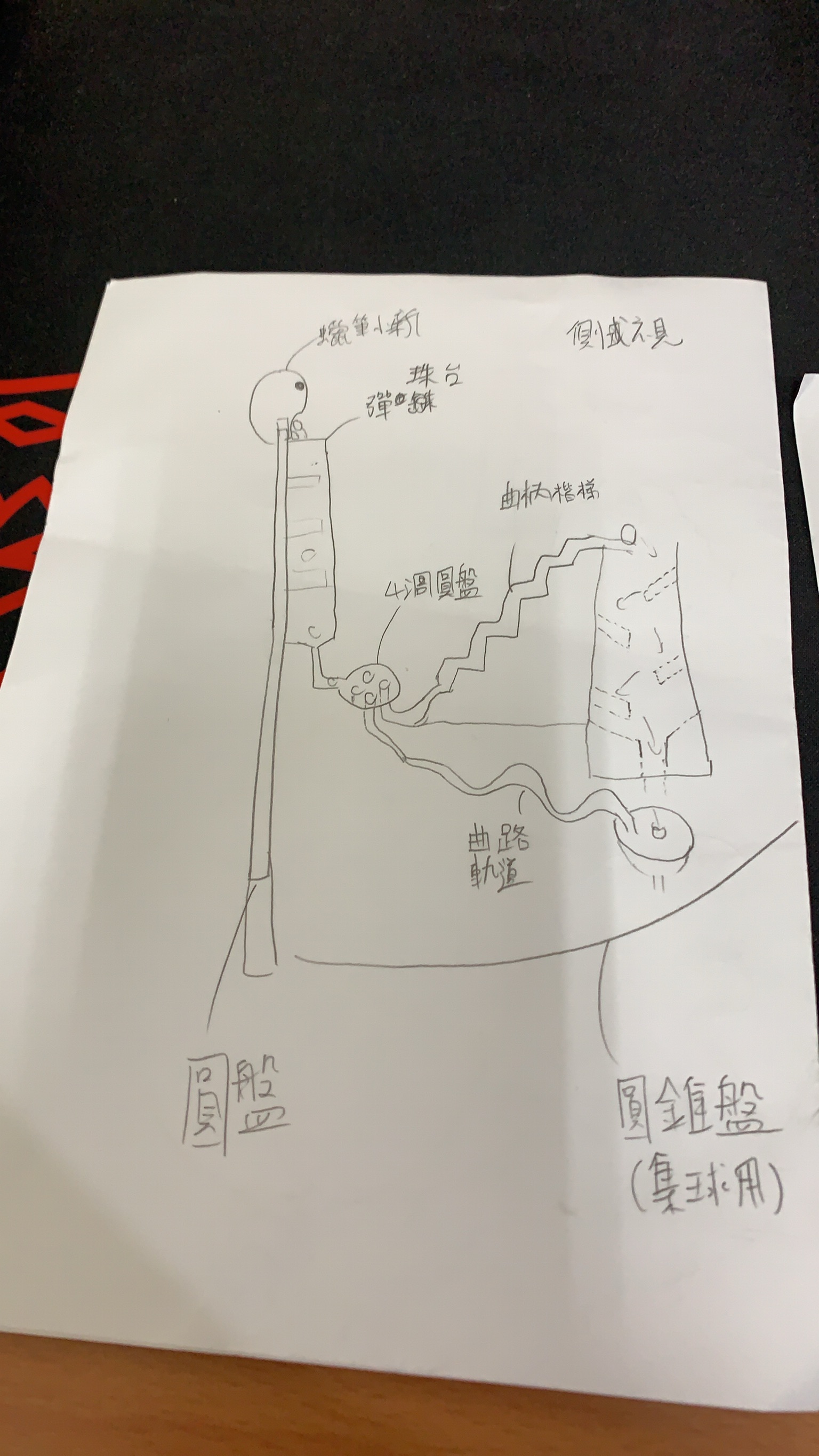
經過一週的討論與研究,發現coppeliasim只支援英文,英文能力欠佳在使用上有些困難,在開會時將問題提出並重新擬定製作方案與方向,最後決定製作鋼球運動系統,透過轉盤、軌道、曲柄、圓錐、斜方體等元件結合並繪製出第一版草圖
第一版草圖
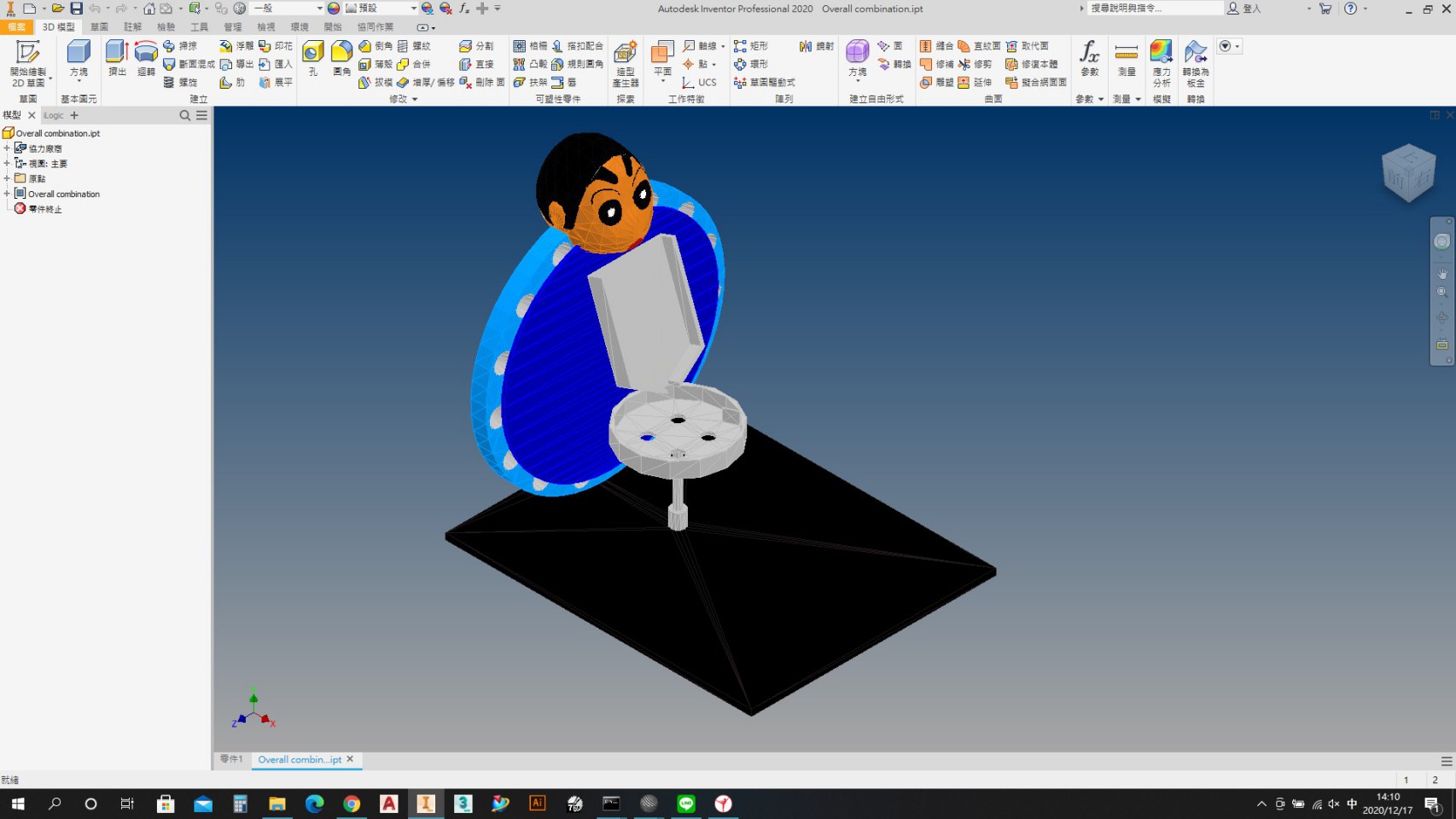
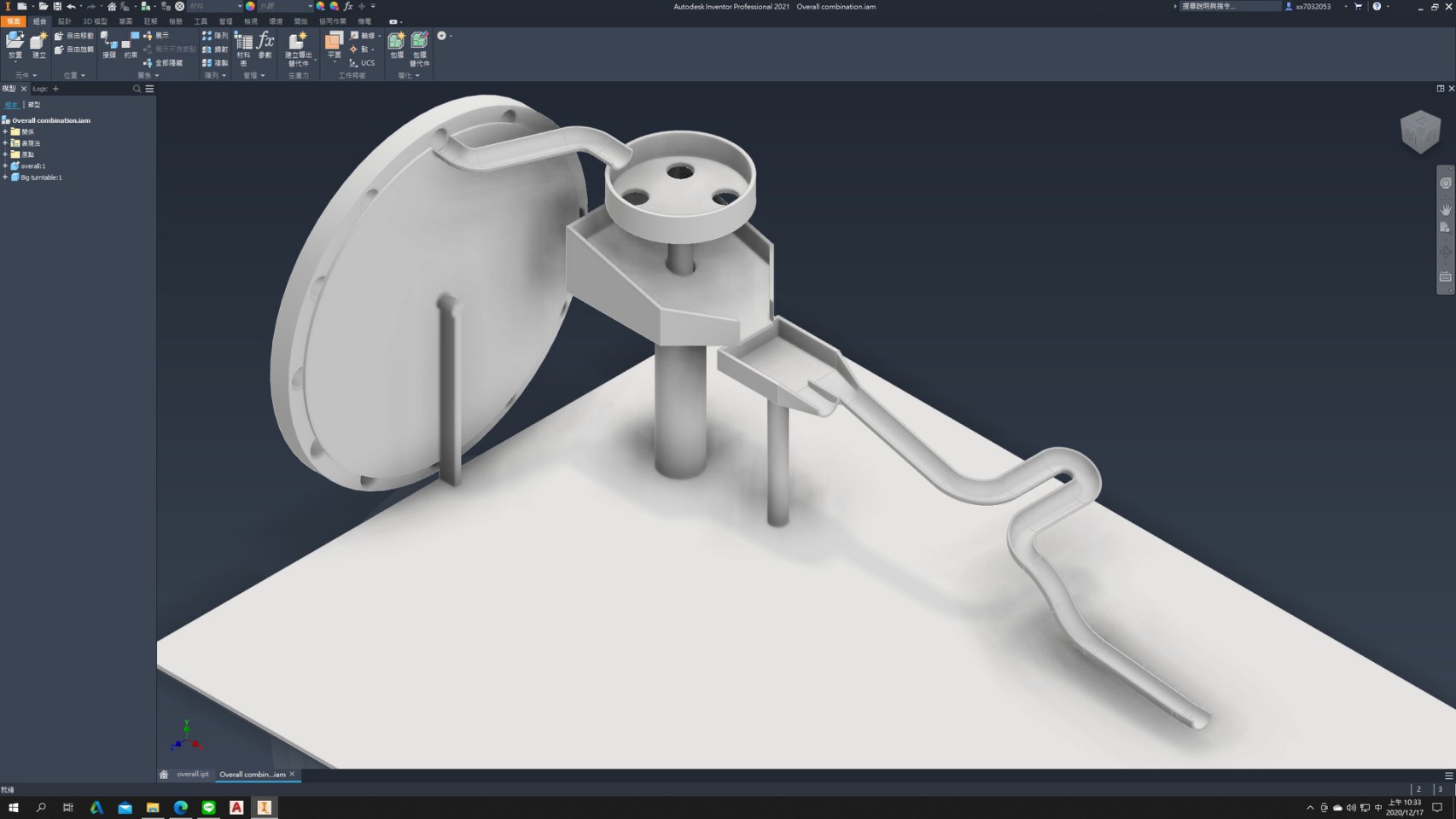
第一版立體圖
W12
本週開會將繪製時所發生的問題提出,並修改草圖與機構樣式,我們發現當球掉入方形斜台再掉入下方轉盤時鋼球並不會掉入孔中,而是原地停轉
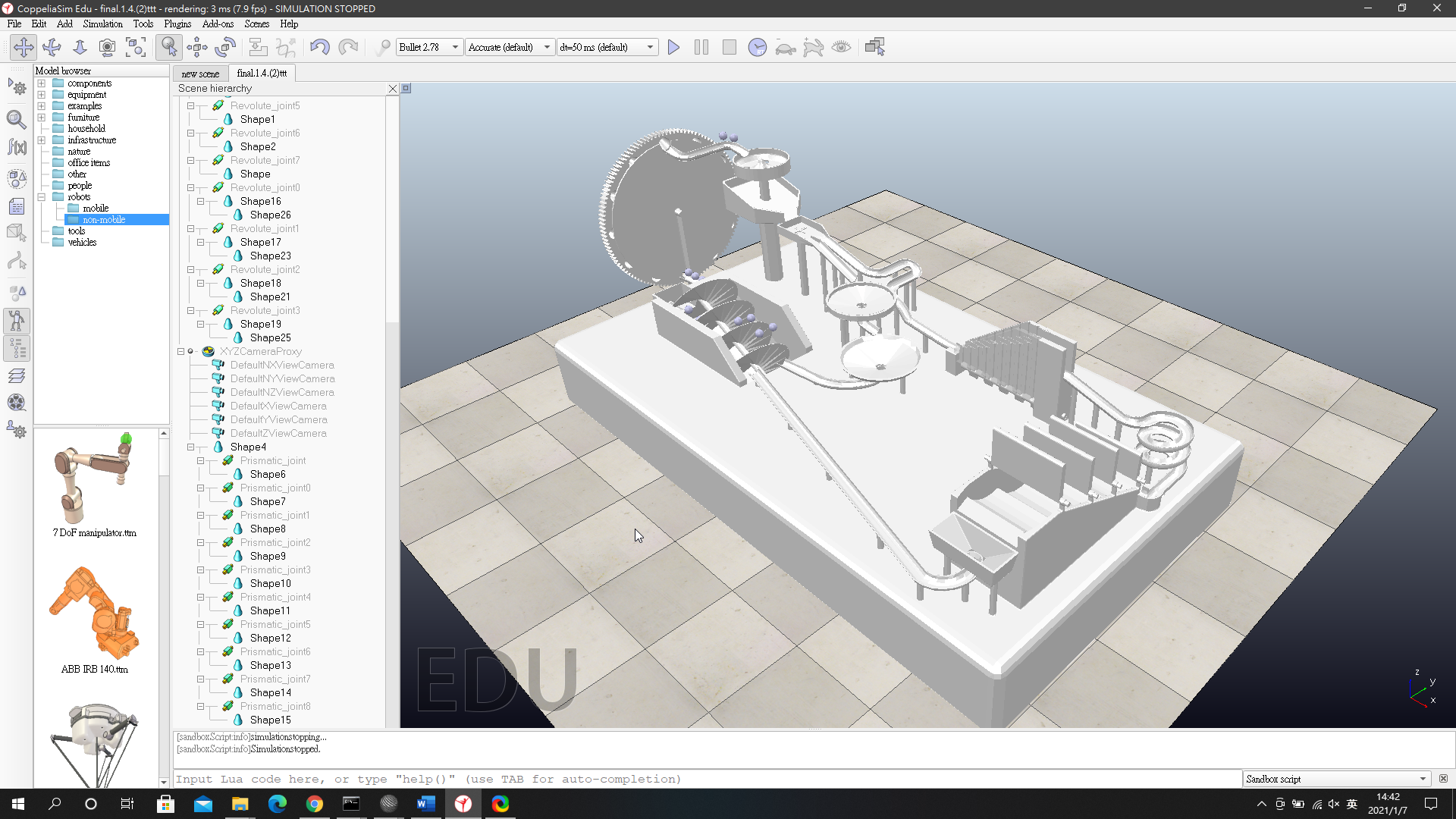
模擬
W13
為了讓求能夠順利的進入洞口,我們修改機構將轉盤與斜方體位置交換,讓轉盤在上旋轉斜方體在下接鋼球,並分支出兩條軌道,在鋼球進入前會有個旋轉機構幫助進入與分流,所以做了草圖修改
第二版草圖

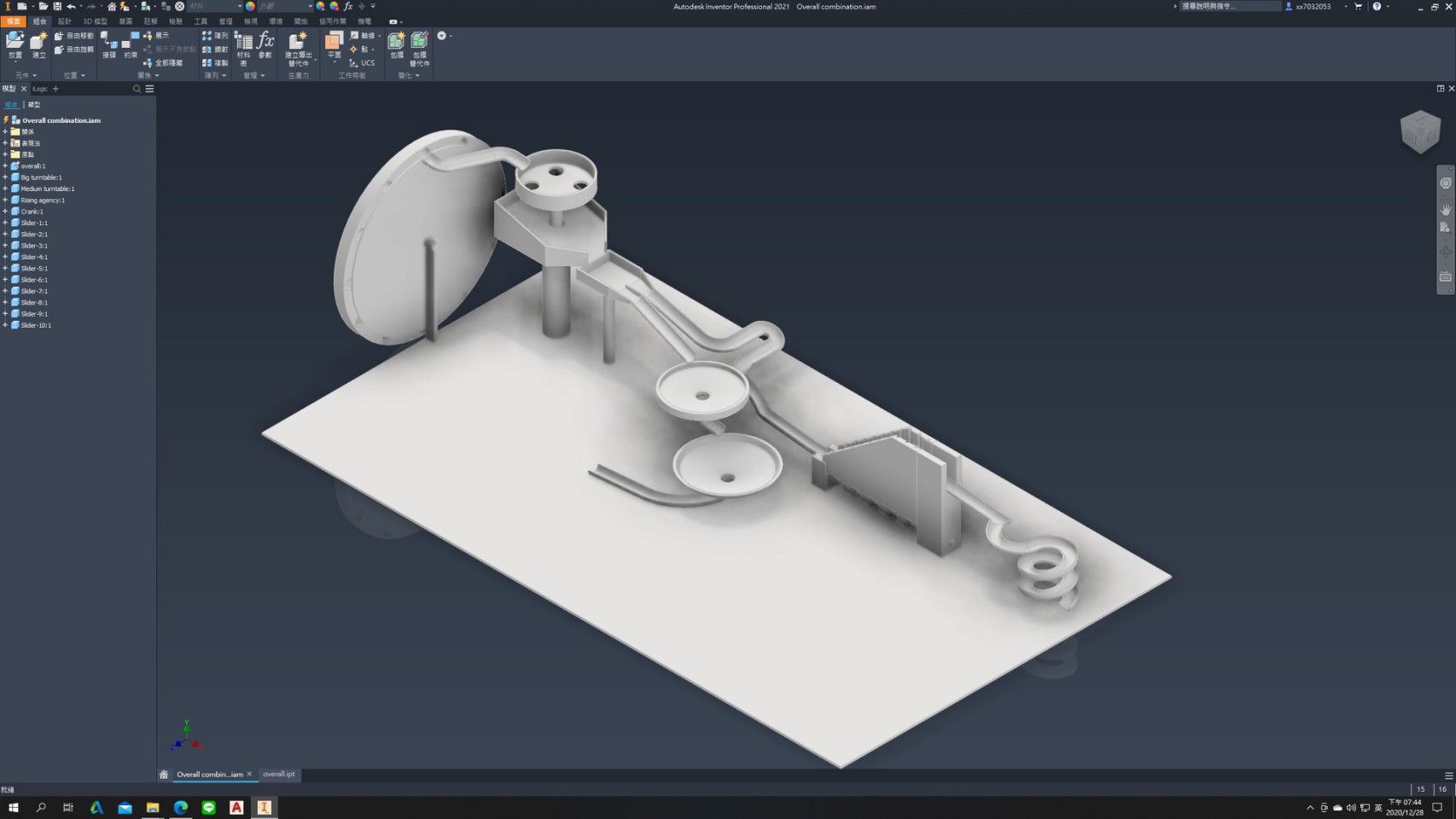
第二版立體圖
W14
本次開會討論,希望將軌道劃分成2條,並在分支出的兩條其中一條加入上升機構,另外一條以全軌道的方式讓鋼球回到最初的大轉盤
第三版立體圖
W15
本週加入了滑塊上升機構,第一軌的螺旋軌道與第二軌的圓盤接球裝置,並討論後續要加入何種機構使整體系統更加完善與豐富
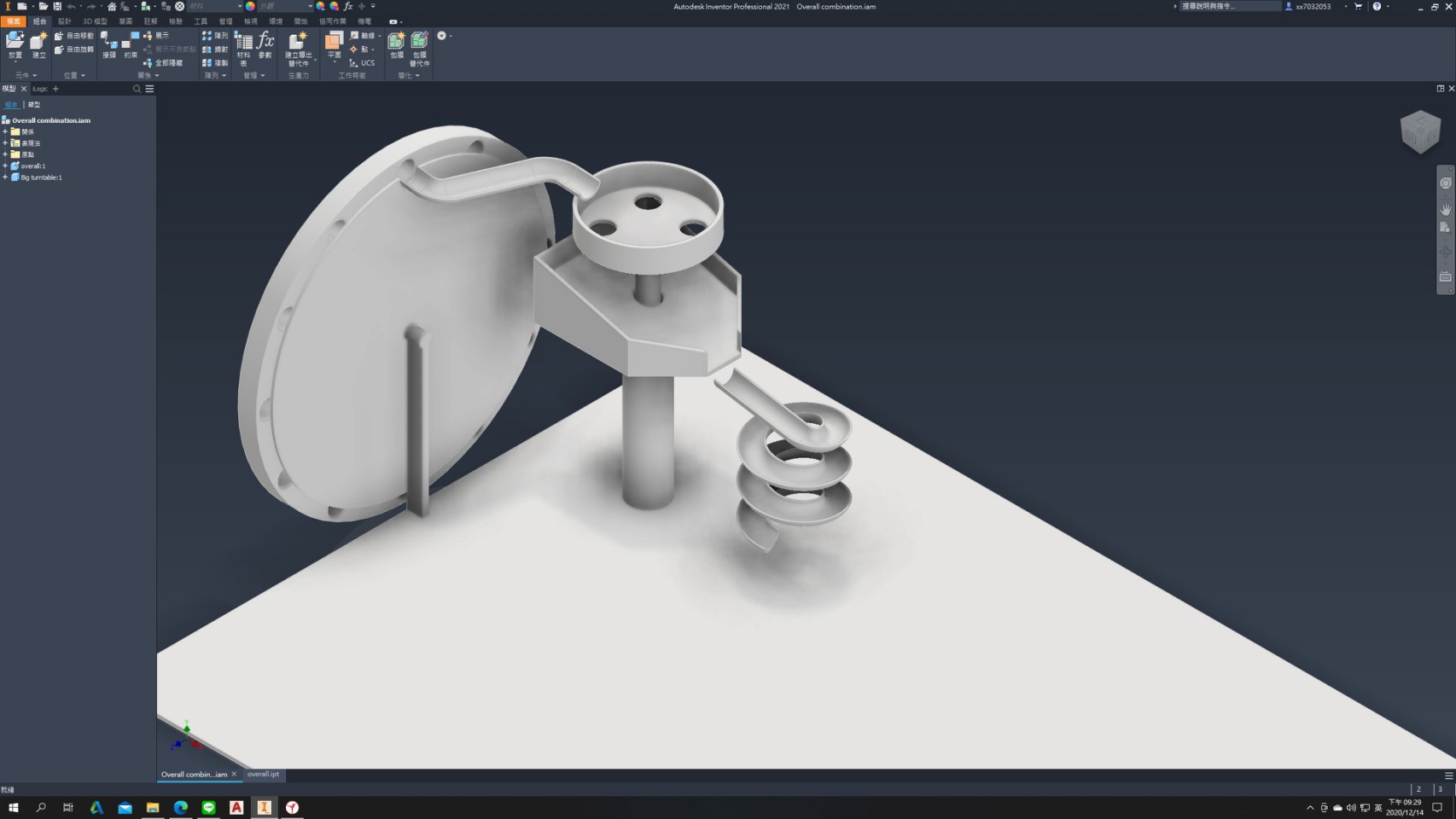
第四版立體圖
W16
本周已將機構各部位問題解決,並將資料做整理以.ttt檔共享給組員
目前專案已完成,日後如有問題會以開會的方式提問,並將問題做修正
Experience <<
Previous