W5 <<
Previous Next >> W7
W6
經過一週的時間,我們將程式進行了修改,但還是有錯誤,無法讓機構以上下左右鍵的方式進行控制。
下方為模擬圖:
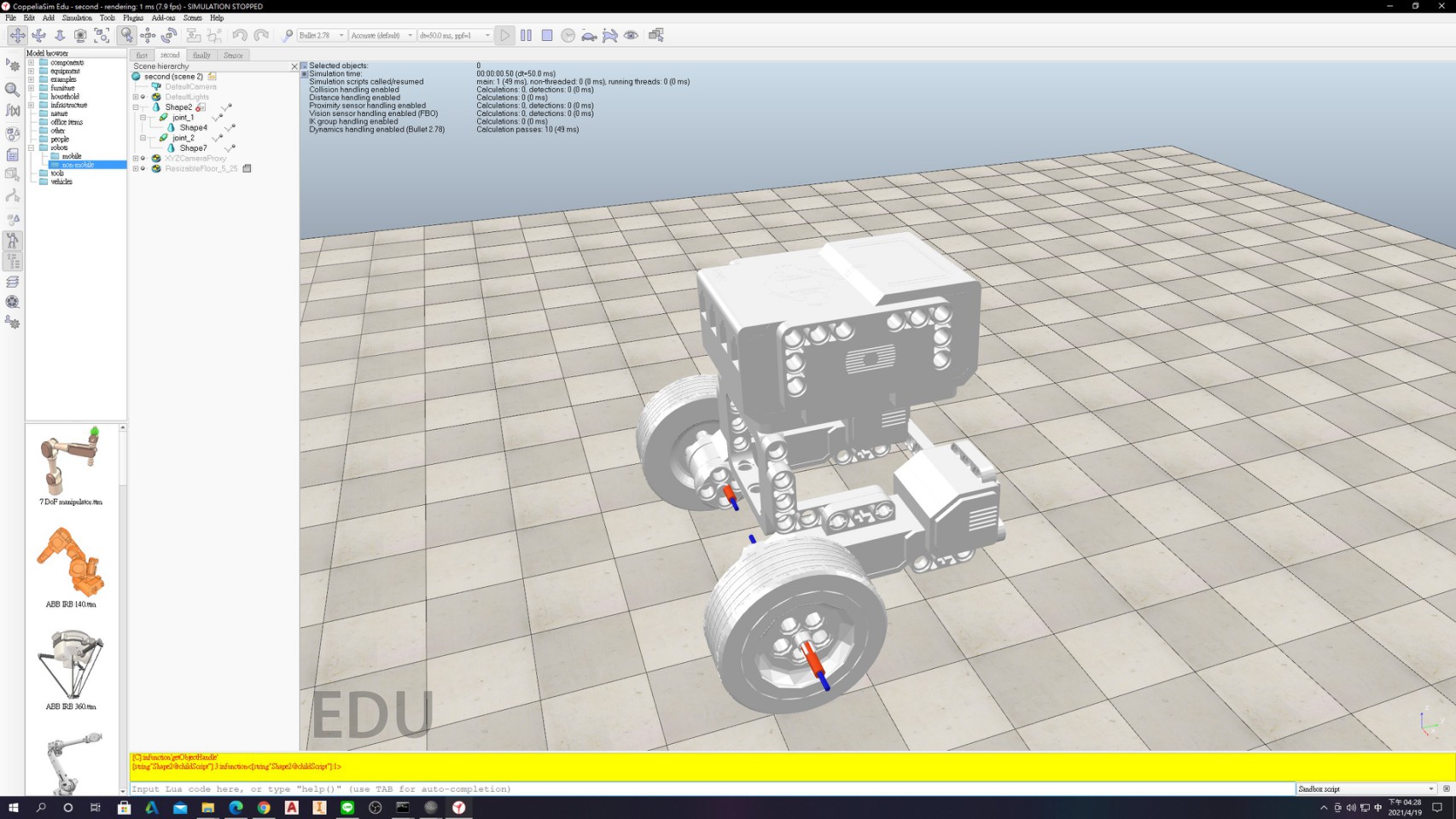
第二次Lua程式測試:
function sysCall_init()
-- do some initialization here
left_front_handle= sim.getObjectHandle('left_front')
left_back_handle= sim.getObjectHandle('left_back')
right_back_handle= sim.getObjectHandle('right_back')
right_front_handle= sim.getObjectHandle('right_front')
joint_1_handle= sim.getObjectHandle('joint_1')
joint_2_handle= sim.getObjectHandle('joint_2')
MaxVel=10
leftvelocity=0
rightvelocity=0
dVel=0.5;
--sim.setJointTargetVelocity(left_front_handle,leftvelocity)
sim.setJointTargetVelocity(left_back_handle,leftvelocity)
sim.setJointTargetVelocity(right_back_handle,rightvelocity)
--sim.setJointTargetVelocity(right_front_handle,rightvelocity)
end
function sysCall_actuation()
-- put your actuation code here
message,auxiliaryData=sim.getSimulatorMessage()
while message~=-1 do
if (message==sim.message_keypress) then
if (auxiliaryData[1]==32) then
-- right key
leftvelocity=0
rightvelocity=0
sim.setJointForce(left_front_handle, 0)
sim.setJointForce(left_back_handle, 0)
sim.setJointForce(right_back_handle, 0)
sim.setJointForce(right_front_handle, 0)
sim.setJointForce(joint_1_handle, 1000)
sim.setJointForce(joint_2_handle, 1000)
break
else
--sim.setJointForce(left_front_handle, 10000)
sim.setJointForce(left_back_handle, 10000)
sim.setJointForce(right_back_handle, 10000)
--sim.setJointForce(right_front_handle, 10000)
sim.setJointForce(joint_1_handle, 0)
sim.setJointForce(joint_2_handle, 0)
end
if (auxiliaryData[1]==2007) then
-- up key
leftvelocity=(leftvelocity+rightvelocity)/2
rightvelocity=leftvelocity
leftvelocity=leftvelocity+dVel
rightvelocity=rightvelocity+dVel
end
if (auxiliaryData[1]==2008) then
-- down key
leftvelocity=(leftvelocity+rightvelocity)/2
rightvelocity=leftvelocity
leftvelocity=leftvelocity-dVel
rightvelocity=rightvelocity-dVel
end
if (auxiliaryData[1]==2009) then
-- left key
leftvelocity=leftvelocity-dVel
rightvelocity=rightvelocity+dVel
end
if (auxiliaryData[1]==2010) then
-- right key
leftvelocity=leftvelocity+dVel
rightvelocity=rightvelocity-dVel
end
end
message,auxiliaryData=sim.getSimulatorMessage()
end
if leftvelocity>MaxVel then
leftvelocity=MaxVel
end
if leftvelocity<-MaxVel then
leftvelocity=-MaxVel
end
if rightvelocity>MaxVel then
rightvelocity=MaxVel
end
if rightvelocity<-MaxVel then
rightvelocity=-MaxVel
end
--sim.setJointTargetVelocity(left_front_handle,leftvelocity)
sim.setJointTargetVelocity(left_back_handle,leftvelocity)
sim.setJointTargetVelocity(right_back_handle,rightvelocity)
--sim.setJointTargetVelocity(right_front_handle,rightvelocity)
end
function sysCall_sensing()
-- put your sensing code here
end
function sysCall_cleanup()
-- do some clean-up here
end
-- See the user manual or the available code snippets for additional callback functions and details
第二次程式失敗,日後將持續進除錯。
W5 <<
Previous Next >> W7